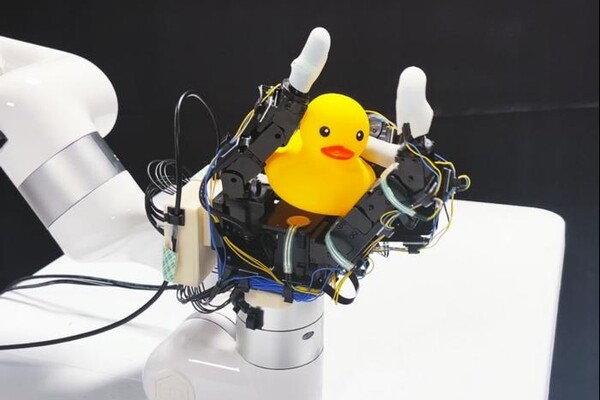
В Калифорнийском университете в Сан-Диего сконструировали роботизированный манипулятор, способный держать и поворачивать предметы, ориентируясь исключительно на прикосновения.
Подобные манипуляторы создавались и ранее, но в большинстве случаев конструкторы использовали отдельные высокочувствительные датчики давления, размещая их в основном на кончиках «пальцев» манипулятора. На этот раз исследователи взяли недорогие датчики, способные определять только сам факт прикосновения, но не силу давления, и разместили их по всей площади «ладони» и «пальцев» манипулятора. Как показали эксперименты, большая площадь покрытия позволяет получить информацию о форме и ориентации предмета, достаточную для того, чтобы вращать его в руке, не роняя и не останавливаясь.Манипулятор успешно обращался с помидором, стеклянной банкой и даже с резиновой уточкой, которая из-за своей формы оказалась наиболее сложным объектом.
Исследователи пытаются научить манипулятор выполнению более сложных действий — например, подбрасыванию предметов.
.jpg)