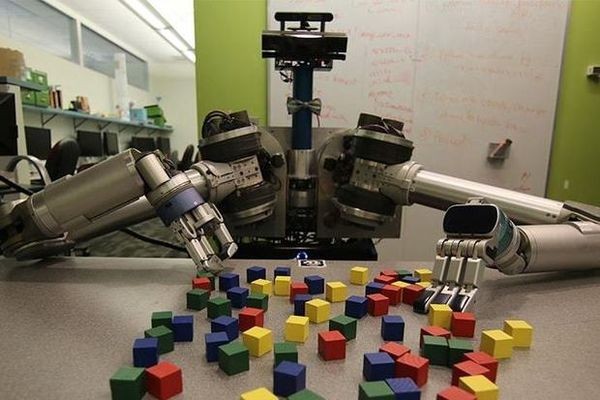
Перед HERB рассыпали гору кубиков, которые тот должен был упорядочить. В какой-то момент робот положил кубик на запястье, выгнув манипулятор вверх, чтобы груз не упал, и перенес. По словам конструкторов, они «этому робота не учили»: он сам воспользовался способностью, которой нет у людей, — у его запястья диапазон изгиба больше, чем у человеческого.
Та же программная система тестировалась на роботе НАСА K-Rex, который должен будет уметь пробираться по поверхности Луны. K-Rex проходил тестовый маршрут с препятствиями, толкая перед собой предмет.
Роботы легко справляются с задачей переноса предмета, если нет беспорядка, но в условиях дома или отдаленной планеты стандартный алгоритм не справится. Новое ПО автоматически находит баланс между двумя стратегиями — последовательная расчистка места от посторонних предметов по одному и перемещение большого числа разом. «Зная» законы физики, робот понимает, что лучше толкнуть и поднять, а на что можно наступить.
.jpg)