
.jpg) |
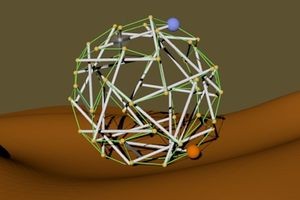
| Корпус сферических роботов будет представлять собой каркасную структуру натяжения-сжатия, сетку из тросов и стержней. Источник: НAСA |
Корпус таких роботов — их назвали ball bot — будет строиться по принципу «тенсегрити», то есть представлять собой сферическую каркасную структуру натяжения-сжатия, сетку из тросов и стержней, объясняют проектировщики. Не имея жестких соединений, колес или гусениц, эти аппараты будут обладать уникальным уровнем надежности, представляя собой легкие конструкции, полностью амортизирующие удар о поверхность планеты при сбросе с орбиты.
«Принципом тенсегрити, широко распространенным в природе, я уже давно хотел воспользоваться в робототехнике, — сказал Витас Санспайрел, старший научный сотрудник Исследовательского центра НАСА им. Эймса. — Его воплощения мы встречаем повсюду, от структуры живых клеток до физиологии мускулов и костей». По словам инженера, конструкция на основе напряженной сетки повышает устойчивость живого организма к внешним воздействиям. «Пользуясь данным принципом, можно создавать очень легких, но при этом очень устойчивых роботов. Такая конструкция целиком работает на поглощение прилагаемых к ней давлений, что делает ее идеальной для робототехники. Вполне возможно, что шарообразные роботы произведут революцию в области исследования космоса. Наша задача — обеспечить многофункциональность такой конструкции. При посадке вездехода на другую планету принимаются сложные меры по его защите: требуются пневматические подушки, летающая лебедка или ракетный двигатель — это немалый балласт, учитывая, что данное оснащение используется всего один раз, при посадке. Шарообразному же роботу не понадобится амортизирующее оборудование — при сильном ударе о поверхность он не понесет существенных повреждений», — пояснил Санспайрел.
.jpg) |
| На отдаленную планету или астероид можно было бы отправить сразу несколько роботов-«мячей». Источник: НAСA |
Сегодня ученые исследуют Марс с помощью роботизированных вездеходов Curiosity и Opportunity — колесных машин, оснащенных научными приборами и механизированными манипуляторами.
Перекатывающийся шарообразный робот с гораздо меньшей вероятностью застрянет в песке, — именно такой инцидент привел к потере марсохода Spirit: после безуспешных попыток ученых вытащить робота, застрявшего в песчаной дюне, его миссию пришлось прекратить.
По словам Санспайрела, робот-шар будет лучше справляться с преодолением препятствий, объезжая или переезжая их, и вряд ли застрянет где-либо .
Под его каркасной оболочкой может находиться еще одна сфера, соединенная тросами с внешней. Она будет содержать системы электропитания, научное оборудование и электронику.
«На другую планету нужно будет доставить научные инструменты, которые помогут расшифровать историю изучаемого мира, — отметил инженер. — Учитывая малую массу самого робота, по нашим оценкам, мы сможем дать ему гораздо большую нагрузку, чем прежним. Научное оборудование сможет занять до половины общей массы робота-шара, тогда как для Curiosity этот показатель составил только 25%».
По словам Санспайрела, проектирование шарообразных роботов еще находится на стадии исследований, и в НАСА пока не определились ни с принципом их действия, ни с полезной нагрузкой. В частности, такого робота можно было бы оснастить отдельным манипулятором либо использовать сами стержни из каркаса для зачерпывания грунта.
Шарообразные роботы, оснащенные видеокамерами, можно сделать небольшими, размером с баскетбольный мяч. На отдаленную планету или астероид можно было бы отправить сразу несколько таких «мячей» и сбросить их в разных местах.
По прогнозу Санспайрела, к 2020 году уже начнутся работы по подготовке шарообразных роботов к миссиям, но до первого запуска еще может пройти десять, а то и двадцать лет.
Роботы-сферы смогут найти применения и на Земле. Например, их можно было бы сбрасывать с самолетов для изучения труднодоступных территорий. Кроме того, такие роботы помогли бы при обследовании трубопроводов, пещер и туннелей.
.jpg)